A Countdown-style Numbers Game in Python
This post is largely because repl.it have an embeddable Python environment and I want to try it out.
Read More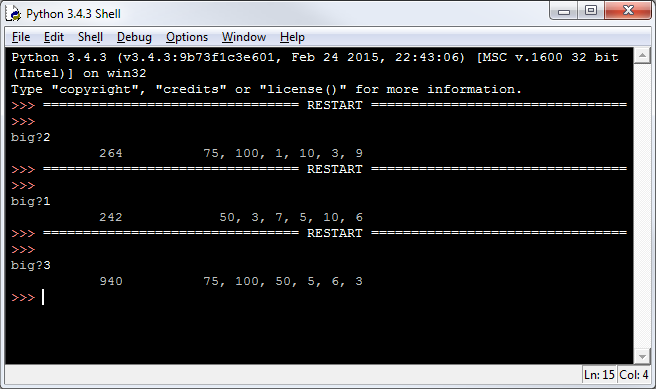
This post is largely because repl.it have an embeddable Python environment and I want to try it out.
Read More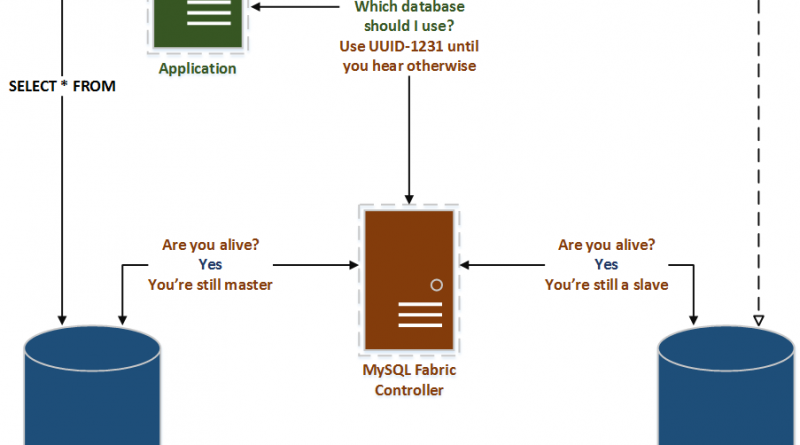
Note: It’s a long time since I used Fabric and wrote this as a draft, so take this as a
Read More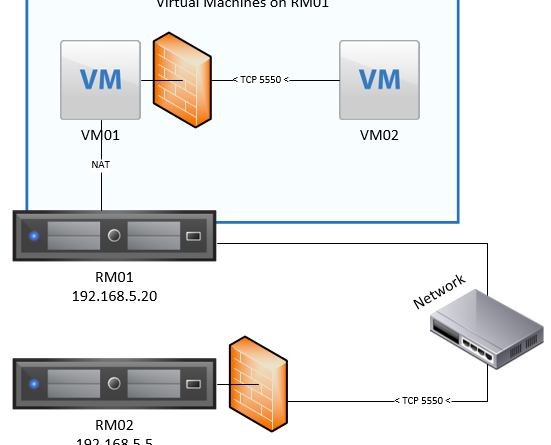
If I don’t note this down I *will* forget how to do it. Ever used netsh? That powerful but largely
Read More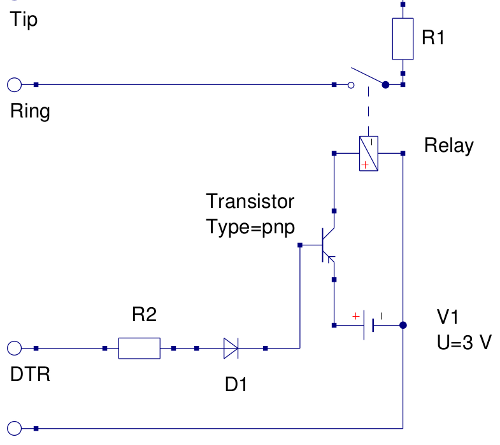
This post details how to achieve the blocking of landline telephone calls using a Linux operating system with only a
Read More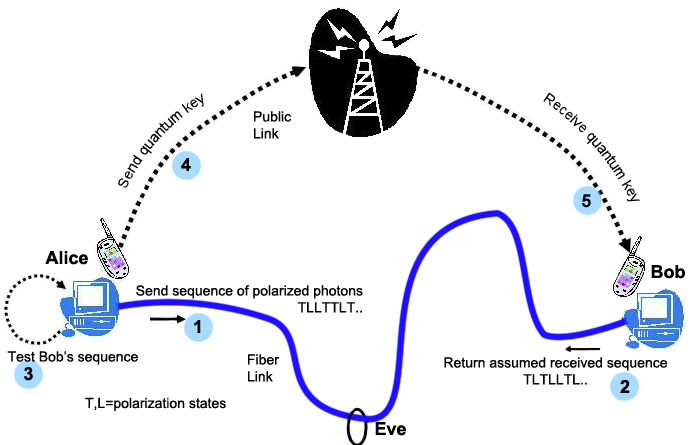
I wrote this summary of quantum cryptography for a research project at university. It seems a shame to leave it
Read More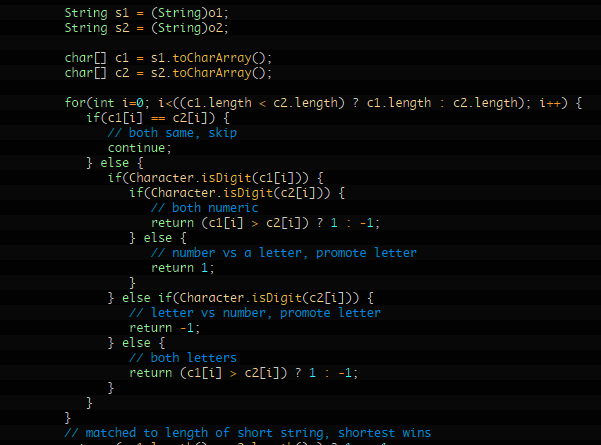
In my last post there was some Java code for bundling up PDF files. In this post, it’s back! This
Read More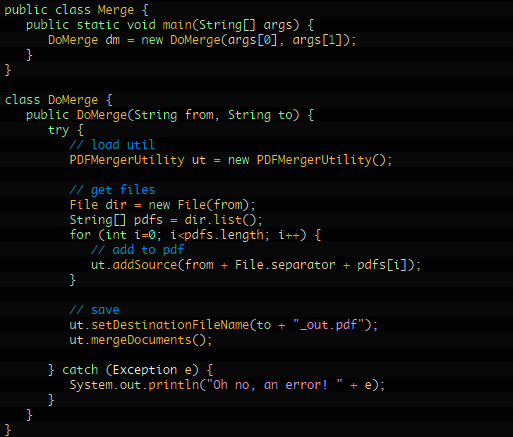
The need to create a variety of similar pages in a PDF file recently came about. Once again unique, once
Read More
Otherwise known as a way of combining a ton of photos of the same area to pull out only the
Read More
I’ve been using something called d-touch recently, which could be described roughly as “barcodes that can look interesting”, and it
Read More